얼마전에 장만한 Dell 노트북에 리눅스(Fedora core 6, 64bits)를 설치해보았다. 멀티부팅을 통해 XP와 리눅스를 같이 설치해 보았는데, 게임이나 인터넷 뱅킹과 같은 것은 XP를 그외 개발에 관련된 코딩이나… 또.. 음.. 모르겠다. 코딩 이외에 리눅스를 어디에 써먹어야할지 아직은.. 기본적으로 OpenOffice가 설치되어져 있던데, 마이크로소프트의 오피스와 호환성의 완성도가 무척 높다. 몇달전부터 쓰던 엑셀로 쓰고 있던 생활비 내역을 리눅스의 오픈오피스로 작업을 해보았다. 이외에 워드나 파워포인트 역시 사용해 본 결과 MS의 오피스에 못지 않았다. 하지만 MS의 오피스가 UI면이나 파워포인트에서의 산출물의 품질은 더 뛰어난것같다. 아직은 말이다..
처음 페도라를 설치할때 32Bit로 했으나, 비디오 드라이버를 설치하는 과정에서 64Bit로 설치하게 되었다. 나의 노트북의 비디오 카드의 X1400이였는데, 32비트에서는 설치가 않되는줄 알았으나, 아니였다. 32비트이든, 64비트이든 상관은 없었다. 페도라가 기본적으로 제공하는 비디오카드는 vesa(정말 오랜만에 들어보는..)이다. 내 노트북의 해상도가 1680×1400인데, 1400×1400만을 지원한다.
Radeon Mobility X1400 비디오 카드를 가진 분들이 페도라 코어 6에서 비디오 드라이버를 설치할때의 어려움에 대한 해결방법을 공유하기 위해 그 방법을 기록해 둔다. 참고로 ATI사에서 제공하는 리눅스 X1400용 비디오 드라이버로 시도해 보았으나 번번이 실패했다. 검색해 본 결과로는 페도라의 경우 해당 드라이버를 자동설치하지 말고 rpm 패키지를 뽑아내어 설치하라고 되어 있었으나, 뽑아내지 못했다. 나와 같은 어려움을 격는 사용자가 많았던지 livna에서 해당 패키지를 뽑아내어 제공하고 있었다. 아래부터는 livna에서 제공하는 패키지를 통해 드라이버를 설치하는 과정이다.
1) rpm -ivh http://rpm.livna.org/livna-release-6.rpm 를 실행해 패키지 다운로드
2) pirut 실행(pirut는 메인메뉴의 “Add/Remove Software”이다)
3) pirut에서 fglrx로 검색한후, “xorg-x11-drv-fglrx”를 설치
4) /usr/sbin/ati-fglrx-config-display enable 실행
5) xorg.conf 파일을 열고 아래 항목으로 수정 및 추가
Section "Module"
Load "dri"
Load "extmod"
Load "glx"
EndSection
Section "DRI"
Group 0
Mode 0666
EndSection
Section "Extensions"
Option "Composite" "False"
EndSection
Section "ServerFlags"
Option "AIGLX" "off"
EndSection
Section "Device"
Identifier "Videocard0"
Driver "fglrx"
Option "DesktopSetup" "single"
EndSection 6) Rebooting 또는 Log-out
7) fglrxinfo 실행하여 ATI에서 제공하는 OpenGL 2.0 드라이버를 지원하고 있는지 확인
display: :0.0 screen: 0
OpenGL vendor string: ATI Technologies Inc.
OpenGL renderer string: ATI Mobility Radeon X1400 Generic
OpenGL version string: 2.0.6174 (8.31.5)
8) glxinfo| grep direct 를 실행하여 Direct Rendering이 가능한지 확인(Yes나와야함)
9) fgl_glxgears를 실행하여 확인(3D로된 3개의 기어가 돌아가는 OpenGL용 샘플)
여기까지 하면 1680×1400 해상도와 OpenGL의 최신버전인 2.0까지 지원하며, 하드웨어 가속을 받을 수 있게 된다. (나는 여기서 환성을 지를 수 밖에 없었다!! ㅡOㅡ)
Nehe 사이트의 OpenGL 튜토리얼 중 리눅스용 소스를 다운로드 받아 실행해보았다. 링크된 샘플 소스가 3가지였는데, 그 중 SDL을 이용한 OpenGL 소스를 컴파일해 실행하였고, 그 결과의 화면은 아래와 같다.
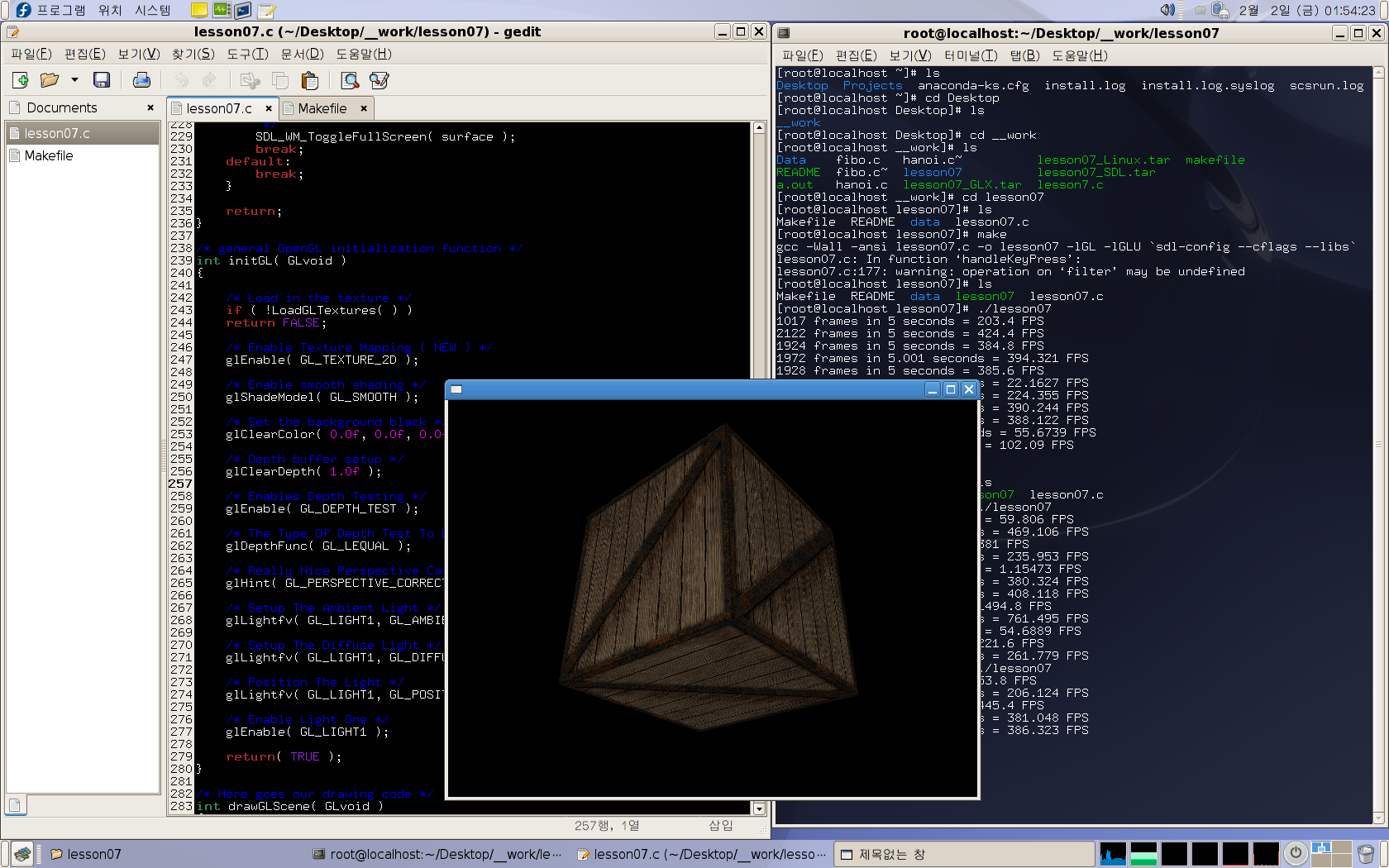
참고로 SDL은 Simple Direct-Media Layer 라이브러리의 약자로, Windows, 리눅스, BeOS, 맥등에서 적용할 수 있는 오픈소스 라이브러리이다. Simple하고 매우 직관적인 라이브러리인지라 접근하는데 매우 쉬울듯하다. SDL은 하드웨어 가속을 받는 비디오 관련 개발, CD-ROM 및 사운드와 동영상 분야의 멀티미디어 개발 등과 쓰레드, 타이머, 플렛폼마다 다른 엔디안 체계에 대한 비종속적인 환경 지원을 하고 있다.
 안습.. ㅜ_ㅜ
안습.. ㅜ_ㅜ 막눈, 막귀인 내가 봐도 단지 색상만 다를 뿐, 그 뒷태, 앞태는 모두 같은데… 이처럼 큰 차이를 느끼게 한다는 것을 깨달았다…. UI에서 색상 고르기를 신부감 고르기보다 더 신중하게 하여야겠다… (피곤하니 글빨이 장난아닌데.. ㅡOㅡ;;)
막눈, 막귀인 내가 봐도 단지 색상만 다를 뿐, 그 뒷태, 앞태는 모두 같은데… 이처럼 큰 차이를 느끼게 한다는 것을 깨달았다…. UI에서 색상 고르기를 신부감 고르기보다 더 신중하게 하여야겠다… (피곤하니 글빨이 장난아닌데.. ㅡOㅡ;;)