가상환경 생성하고 VS.Code에서 원하는 가상환경을 선택하도록 하는 과정을 정리해 둡니다.
일단 콘설창을 실행하고, 생성하고자 하는 가상환경 가상환경이 저장될 폴더로 이동한 뒤 아래의 명령을 입력합니다.
python -m venv python_virtualenv
그러면 python_virtualenv 폴더가 생성된 것을 확인할 수 있습니다. 여기까지가 파이선에서 가상환경 생성의 전부입니다.
이제 VS.Code에서 이 가성환경을 통해 코드를 실행하기 위한 설정입니다.
VS.Code를 실행하고 단축키 F1를 누르면 Python에 대한 인터프리터를 선택할 수 있는 항목이 표시됩니다. 이 항목을 클릭합니다.
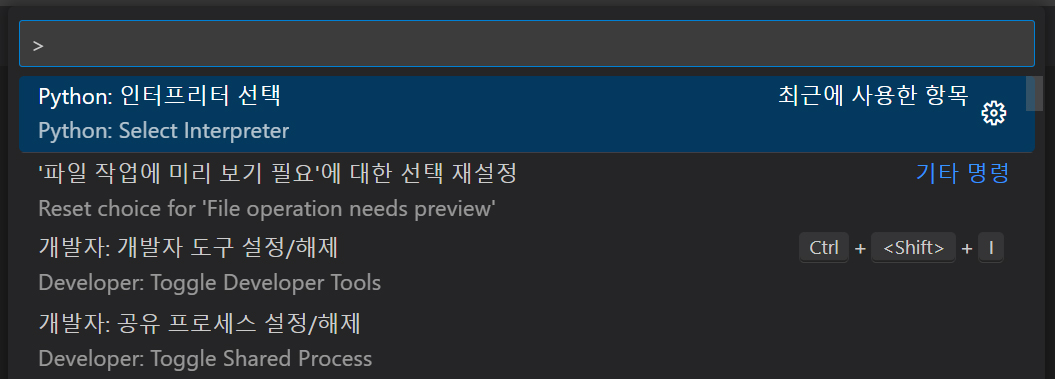
“+ 인터프리터 경로 입력…”을 클릭하고 “찾기…”에서 이전에 생성한 가상환경 폴더에 위치한 Scripts/python.exe 파일을 선택합니다.
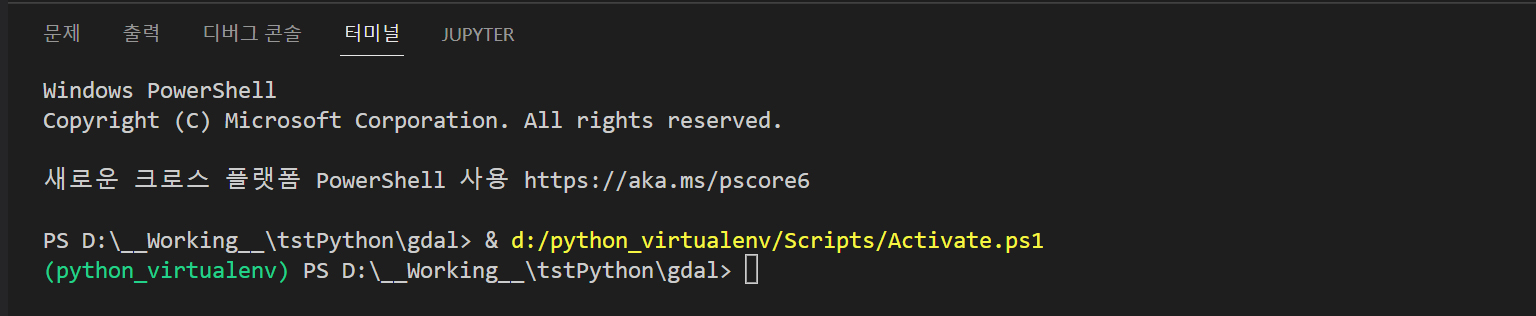
이제 새로운 터미널이 표시될때마다 다음처럼 가상환경 이름 표시와 함께 명령 프롬프트가 표시됩니다.
그리고 GDAL 설치는 다음과 같습니다.
먼저 WHL 파일을 다운로드(https://www.lfd.uci.edu/~gohlke/pythonlibs/#gdal) 받고 다음 명령으로 설치하면 됩니다.
pip install .\GDAL-3.4.3-cp311-cp311-win_amd64.whl